多相モーターの電力測定方法
はじめに
EVや産業機器の高性能化が進む中、モーターの多相化が加速しています。従来から主流だった3相構成に代わり、5相や6相といった多相モーターが採用されるケースも増えてきました。具体的な用途として電動航空機や自動運転EVなどへの応用が期待されています。
多相化により、各相の電流容量を下げることで抵抗損失が減少し、発熱も抑えられるため、結果的にモーターの高出力化や効率改善が可能となるほか、冗長性*1や出力密度の向上といったメリットも得られます。その一方で、測定や評価の難易度が大幅に上がることが課題となっています。

- *1:巻線が多く独立しているため、1相が故障しても残りの相である程度トルクを維持して動作を続けることができます。
多相モーターの電力測定の課題と要点
多相モーターの電力測定における課題として次の2点が挙げられます。
電圧と電流CH数の増加
5相モーターでは5CH、6相モーターでは6CHの電圧と電流を同時に測定する必要があり、測定器には多数の入力CHと高精度測定が求められます。特に高周波領域では、各相の電圧や電流の位相誤差が有効電力や効率の算出に直接影響するため、帯域特性に加えて位相精度も重要です。
演算処理の複雑化
3相系では、有効電力や効率算出において標準化された演算式が一般的に使用されますが、5相や6相では位相角が異なるため、相ごとに個別演算を行い、全体で合算する処理が必要になります。そのため、測定器側でユーザー定義演算*2が設定できることが、多相モーターの電力測定の実現のために必要不可欠です。
- *2:ユーザー自身が演算式を設定して、設定した演算値を測定画面でリアルタイム表示できる機能です。UDF(User Defined Function)とも呼ばれます
多相モーターの電力測定に最適な測定器
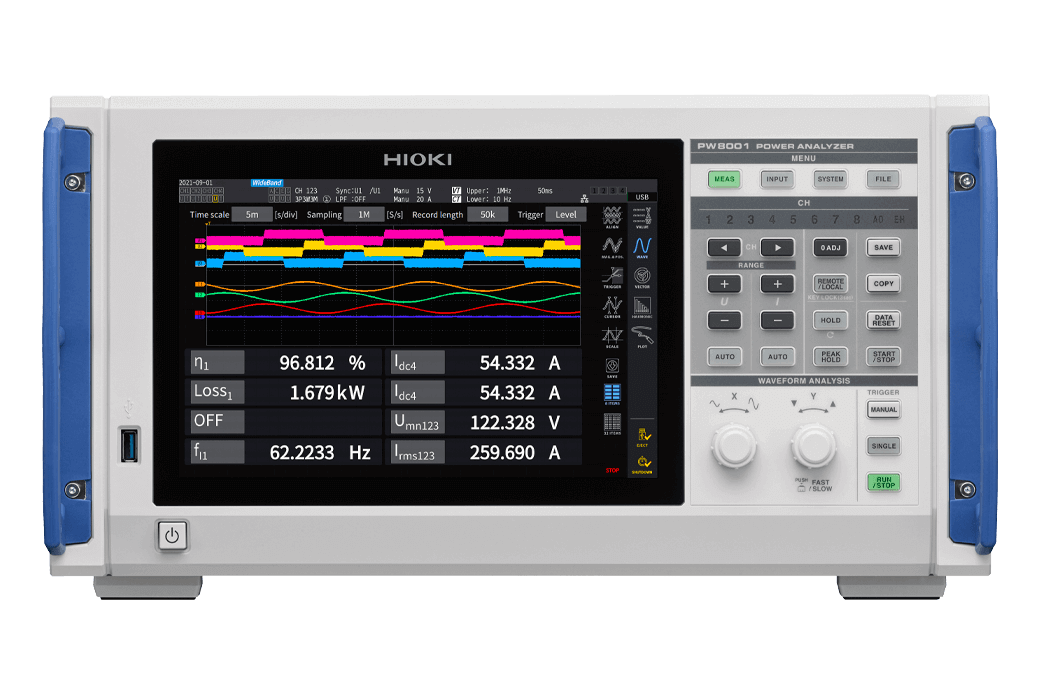
PW8001がおすすめです。広帯域にわたって高い振幅確度と位相確度を保証しています。大画面でそれぞれの相の電力パラメータをリアルタイムに見られるほか、複数のベクトル画面表示によって直感的に位相のバランスを確認できます。
また、モーター解析オプションを選択することで、トルクや回転に加え、モーターの効率や損失の測定も可能です。さらに測定対象の定格や口径に応じて、さまざまな電流センサーを組み合わせてご使用いただけます。
測定方法
実際にPW8001を例にとって、多相モーターの電力を測定するための具体的な手順を紹介します。
N相モーター電力測定時の基本事項
電圧:各相-中性点orモーターのシャシー(または接地線)間を測定
電流:各線電流を測定
CH数 :モーターの相数と同じCH数(N CH)を用意する
デルタ結線およびスター結線ともに、モーターシャシー(または接地線)を基準として結線します。スター結線の場合、本来は中性点を基準とするのが理想ですが、一般的に中性点の取り出しは困難なため、モーターシャシーまたは接地線を基準とします。
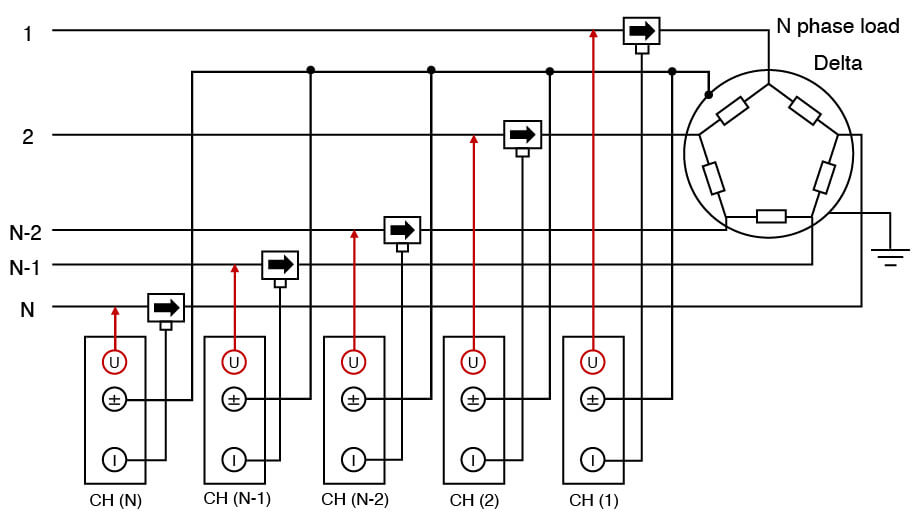 デルタ結線の場合
デルタ結線の場合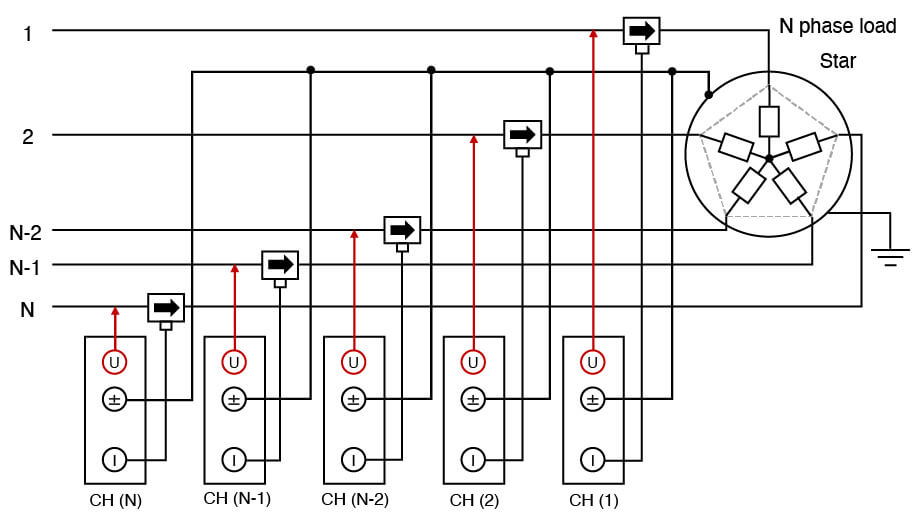 スター結線の場合
スター結線の場合
このとき、N相モーターの有効電力は次の式で表されます。
Pall = P1+P2+⋯+PN-2+PN-1+PN
例1|5相モーター
5相モーターの測定を例にとって説明します。
右に示すように、モーターシャシー(または接地線)を基準とした1P2W結線を行います。
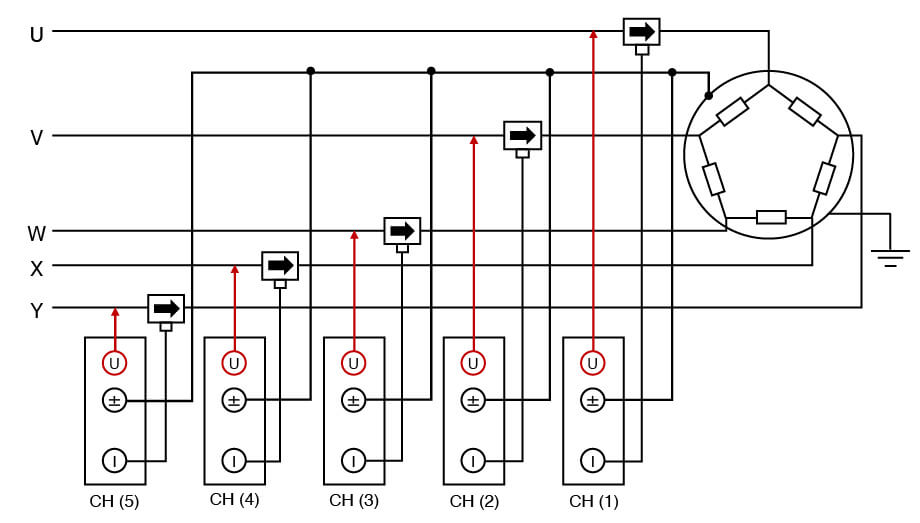
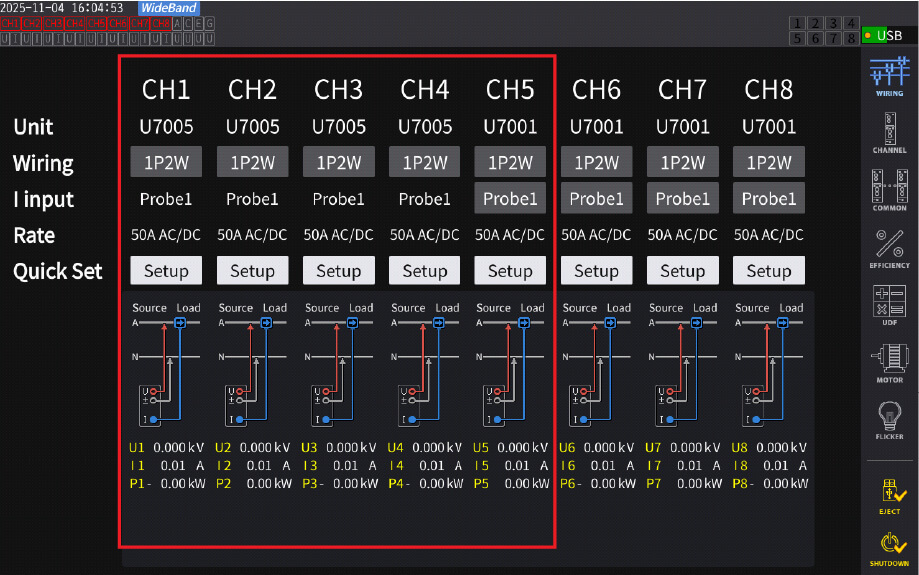
結線設定画面で、それぞれのCHの結線を1P2W×5相に設定します。(N相モーターの場合は1P2W×N相分のCHを用意します)
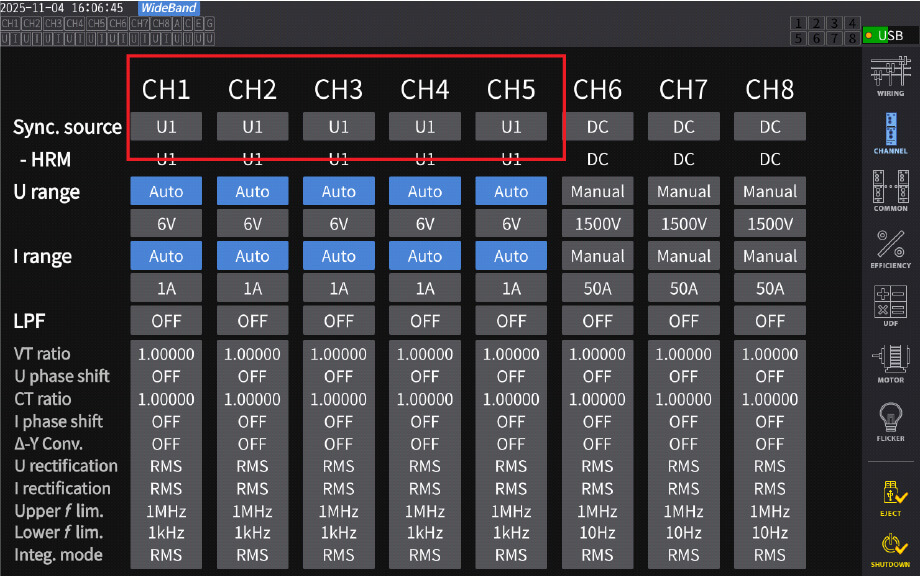
測定する5相分のCHの同期ソースを共通にします。(右図ではCH1の電圧に統一)
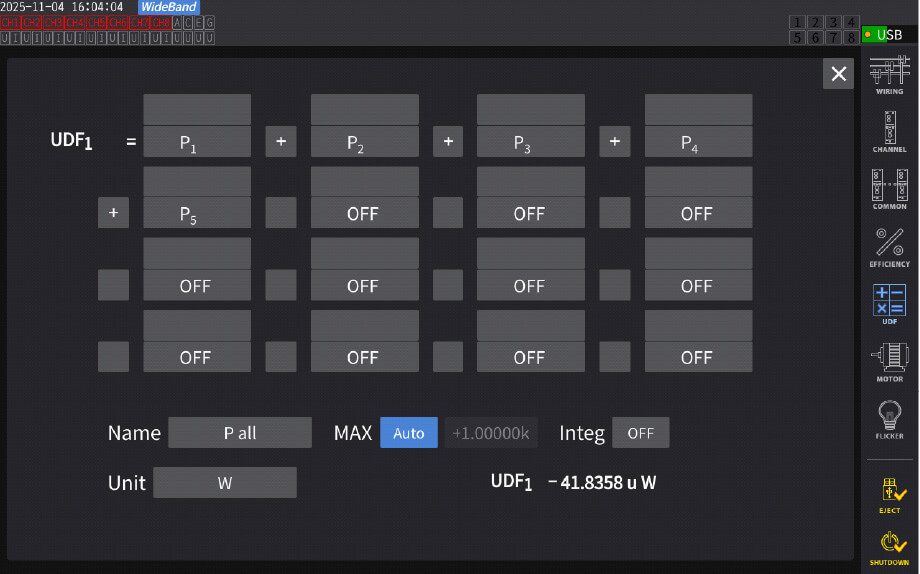
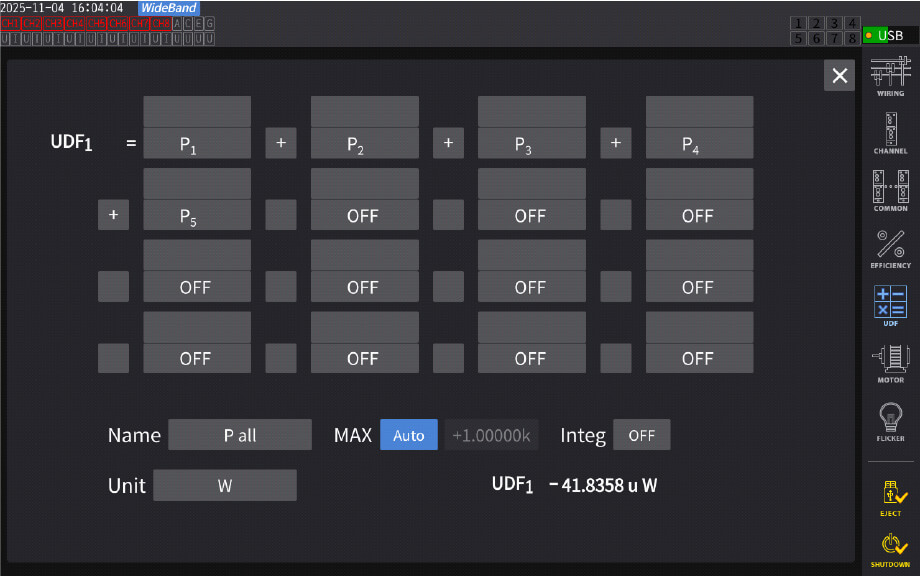
各相の電力の総和をUDFで設定して、5相モーターのトータル電力を表示します。右図では Pall = P1+P2+P3+P4+P5 としています。
N相モーターの場合は、N相分の電力の総和を設定します。
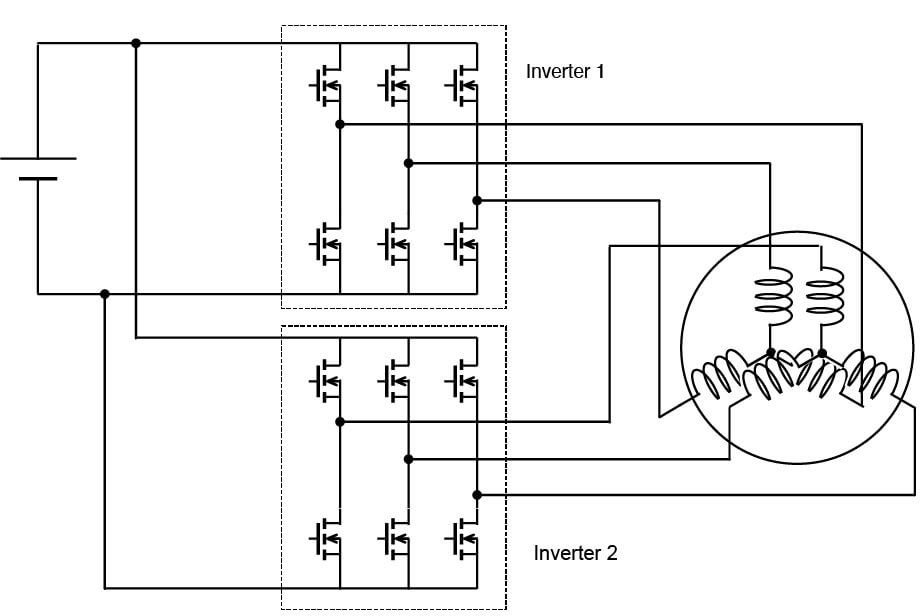
例2|オープンエンド巻線モーター(6相 デュアルインバーター)
オープンエンド巻線モーターの有効電力は、次の式のように1次側と2次側の電力の合計で表されます。
Pall = P(1次側の有効電力)+P(2次側の有効電力)
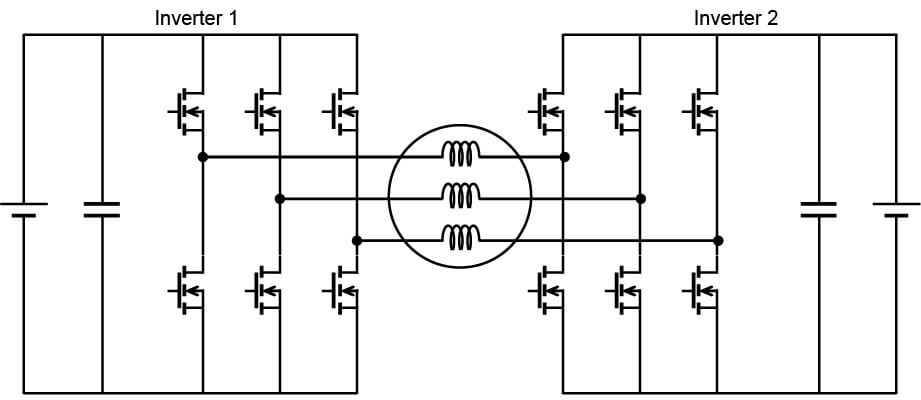
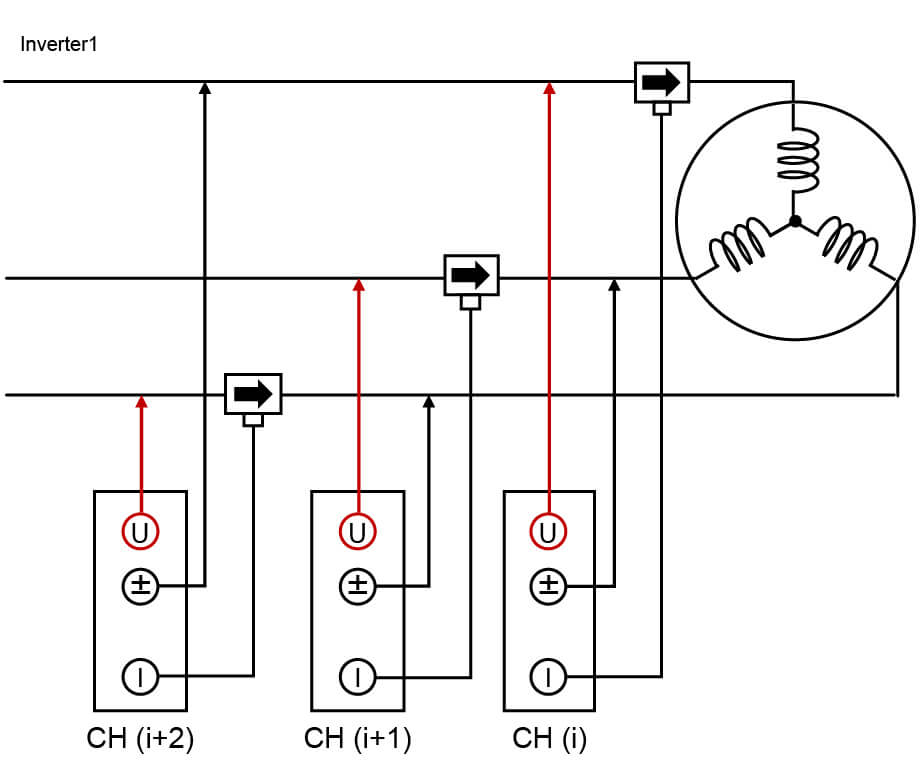
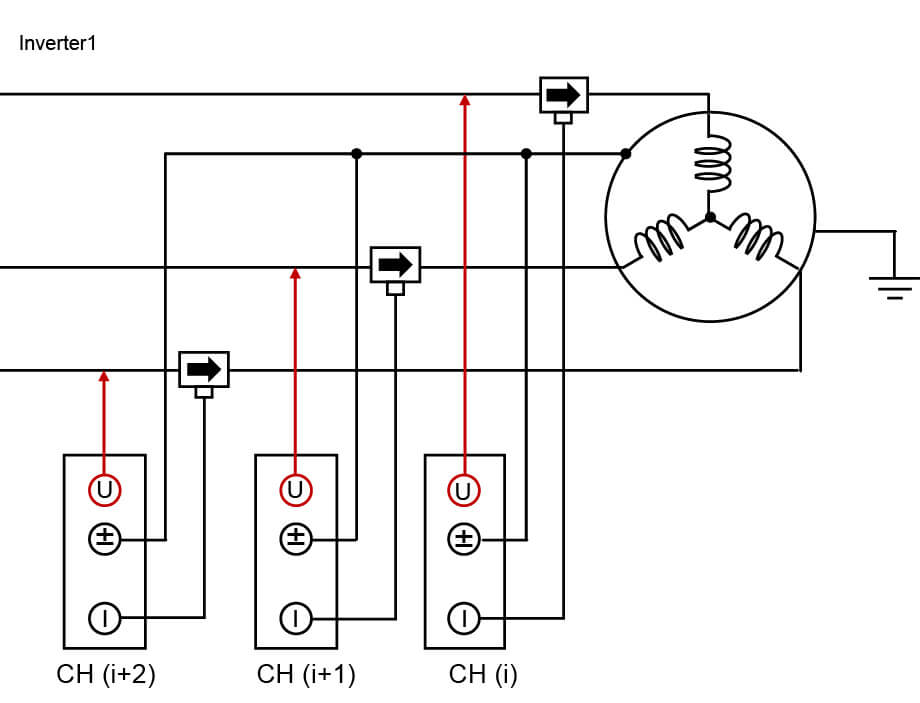
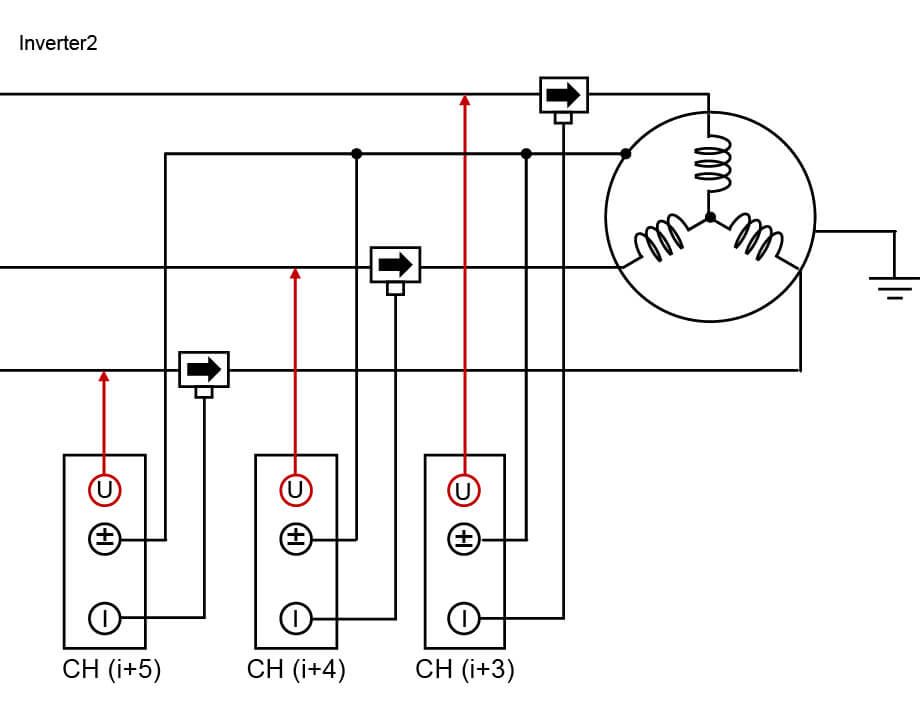
次に示すように、接地線を基準とした1次側と2次側それぞれの相電圧を測定します。電流センサーはそれぞれインバーター側からモーター負荷の方向へ接続します(図ではインバーター1→モーター負荷、インバーター2→モーター負荷の電流方向で接続)。
通常、バッテリー(電源)のマイナス端子は大地に対して切り離された状態です。このような場合は、各CHで共通の電位を基準として結線することで、系統のGND電位差による影響を受けずに測定を行うことができます。
図ではインバーター1次側のフレーム接地線を基準としています。
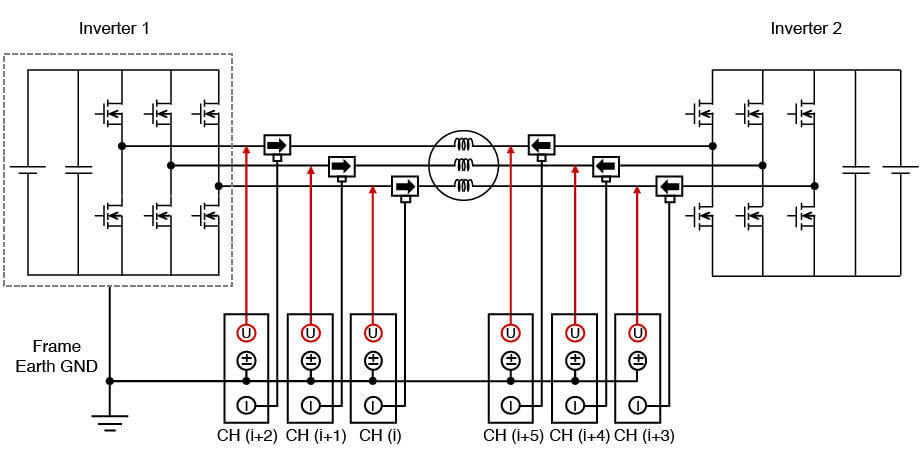
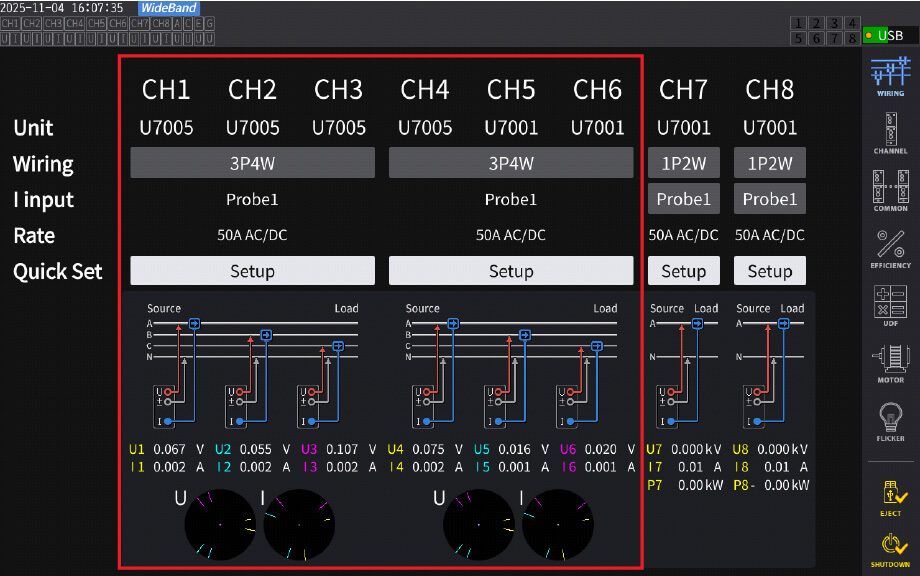
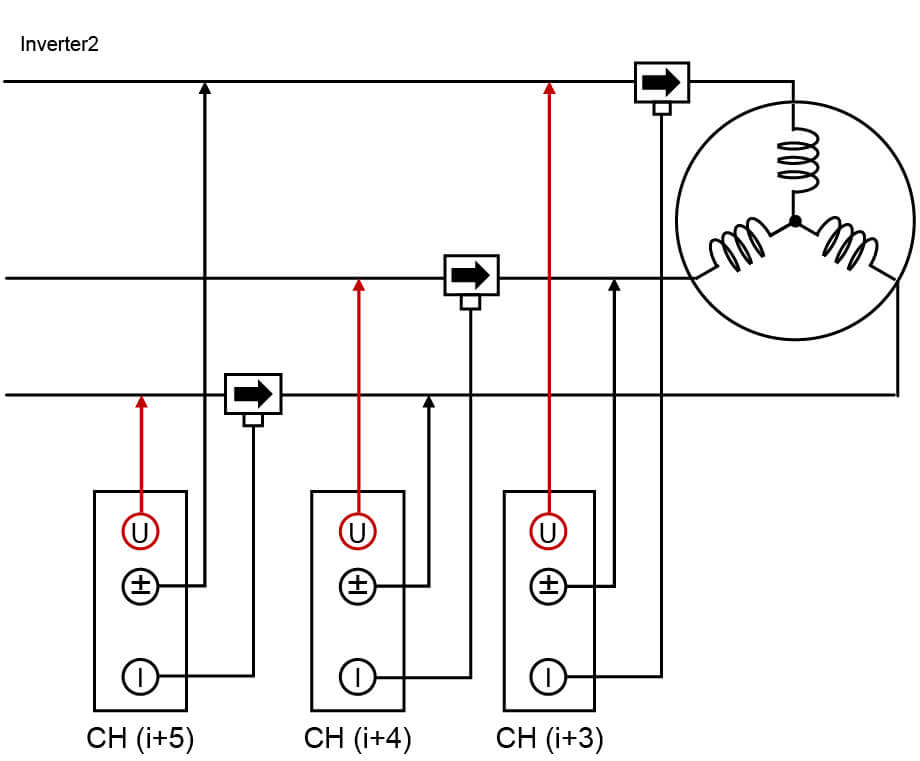
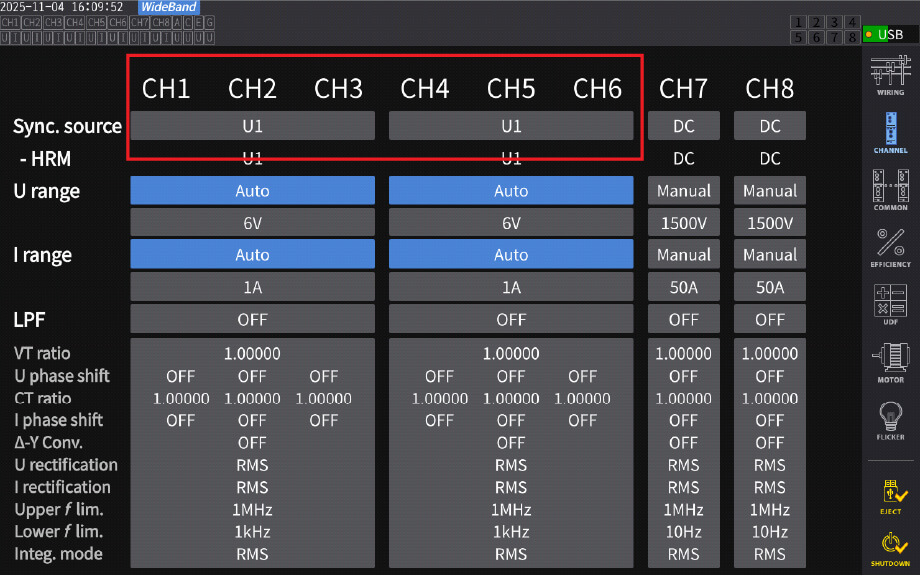
結線設定画面で、1次側、2次側でそれぞれ3P4W結線を選択します。(右図では1次側にCH1~CH3、2次側にCH4~CH6を選択)
測定するCHの同期ソースを共通にします。(右図では1次側の電圧に統一)
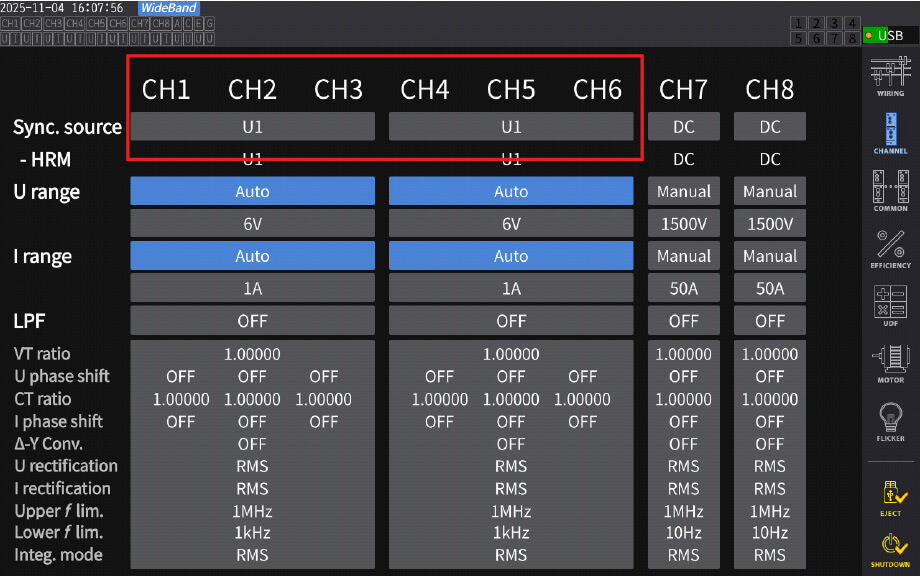
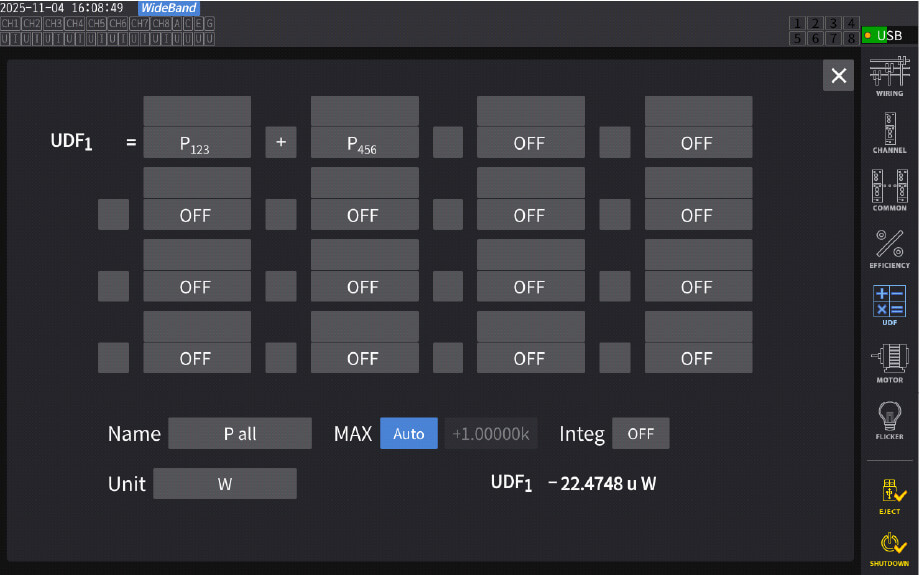
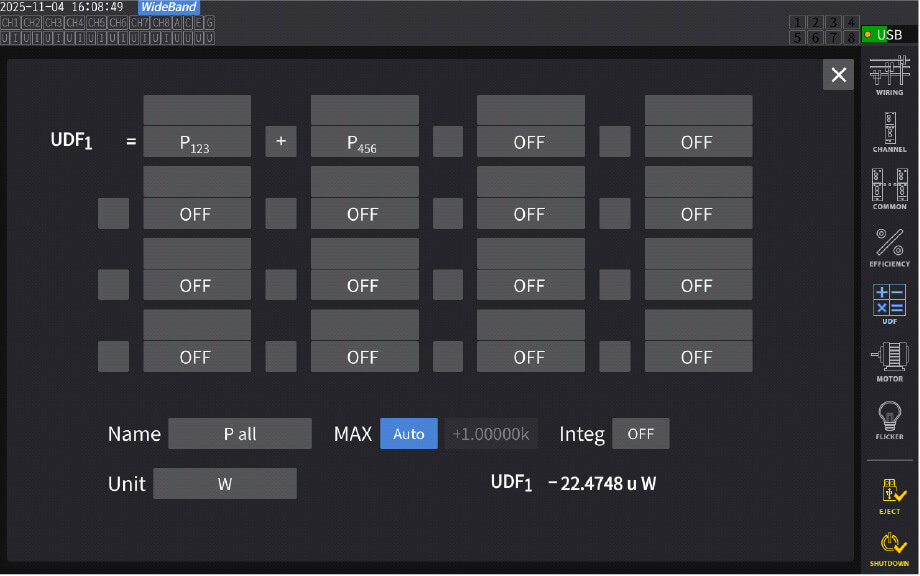
各相の電力の総和をUDFで設定して、トータル電力を表示します。図では Pall=P123+P456 としています。
例3|2重三相モーター(3相モーター×2)
2重三相モーターの有効電力は、次の式のように2系統の電力の合計で表されます。
Pall=P(系統1の電力)+P(系統2の電力)
インバーター×1と三相モーター×1を1セットとして、2系統分の電力を測定します。
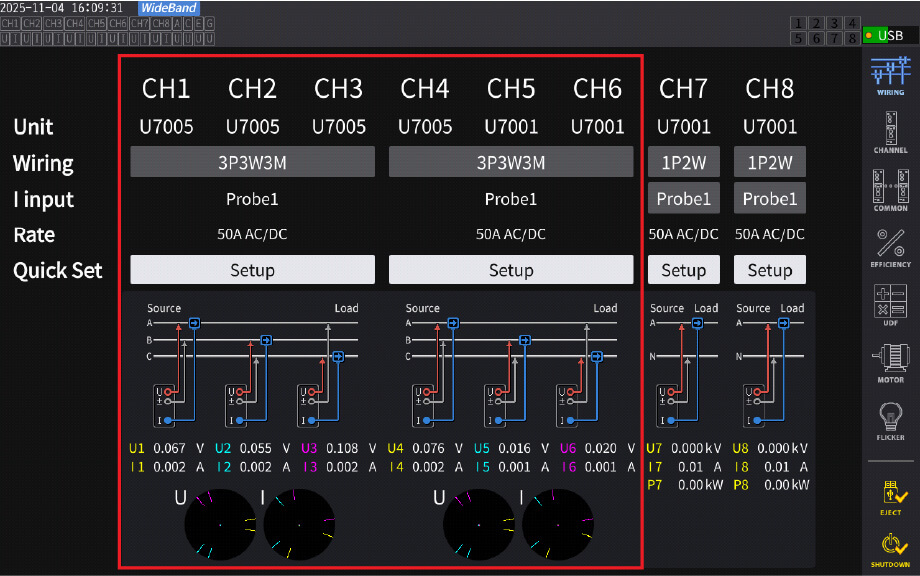
・3P3W3Mの場合の結線と結線画面
次に示すように結線します。
右図では1系統目をCH1~CH3、2系統目をCH4~CH6に設定しています。
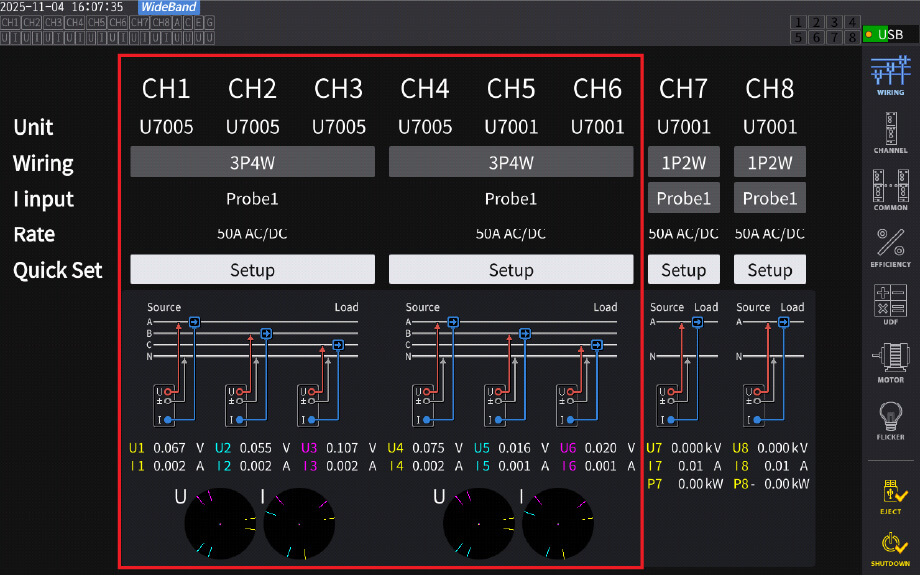
・3P4Wの場合の結線と結線画面
次に示すように結線します。本来は中性点を基準とするのが理想ですが、一般的に中性点の取り出しは困難なため、モーターシャシー(または接地線)を基準とします。
右図では1系統目をCH1~CH3、2系統目をCH4~CH6に設定しています。
測定する2系統分のCHの同期ソースを共通にします。(右図では1系統目の電圧に統一)
UDF機能を使用して2系統分の電力をそれぞれ合算して測定します。右図ではPall=P123+P456 としています。
まとめ
モーター技術の高度化に伴い、5相や6相をはじめとする多相モーターの採用が今後ますます進むと予想されます。本アプリケーションノートで紹介した方法により、多相構成であっても正確な電力測定が可能となり、多相モーターの電力特性の高精度な評価や、開発段階での性能解析や効率改善をより確実に行うことができます。
PW8001の詳細情報は弊社の製品ページをご覧ください。アプリケーションノートや測定についてご質問がありましたら、お気軽に弊社までお問い合わせください。
